一文了解如何使用OpenCV进行图像处理
介绍
OpenCV – 开源计算机视觉。它是计算机视觉和图像处理任务中使用最广泛的工具之一。它被用于各种应用,如面部检测、视频捕捉、跟踪移动物体、对象公开。如今应用在 Covid 中,如口罩检测、社交距离等等。
在这篇博客中,将通过实际示例涵盖图像处理中一些最重要的任务来详细介绍 OpenCV。那么让我们开始吧
目录
边缘检测和图像梯度
图像的膨胀、打开、关闭和腐蚀
透视变换
图像金字塔
裁剪
缩放、插值和重新调整大小
阈值、自适应阈值和二值化
锐化
模糊
轮廓
使用霍夫线检测线
寻找角落
计算圆和椭圆
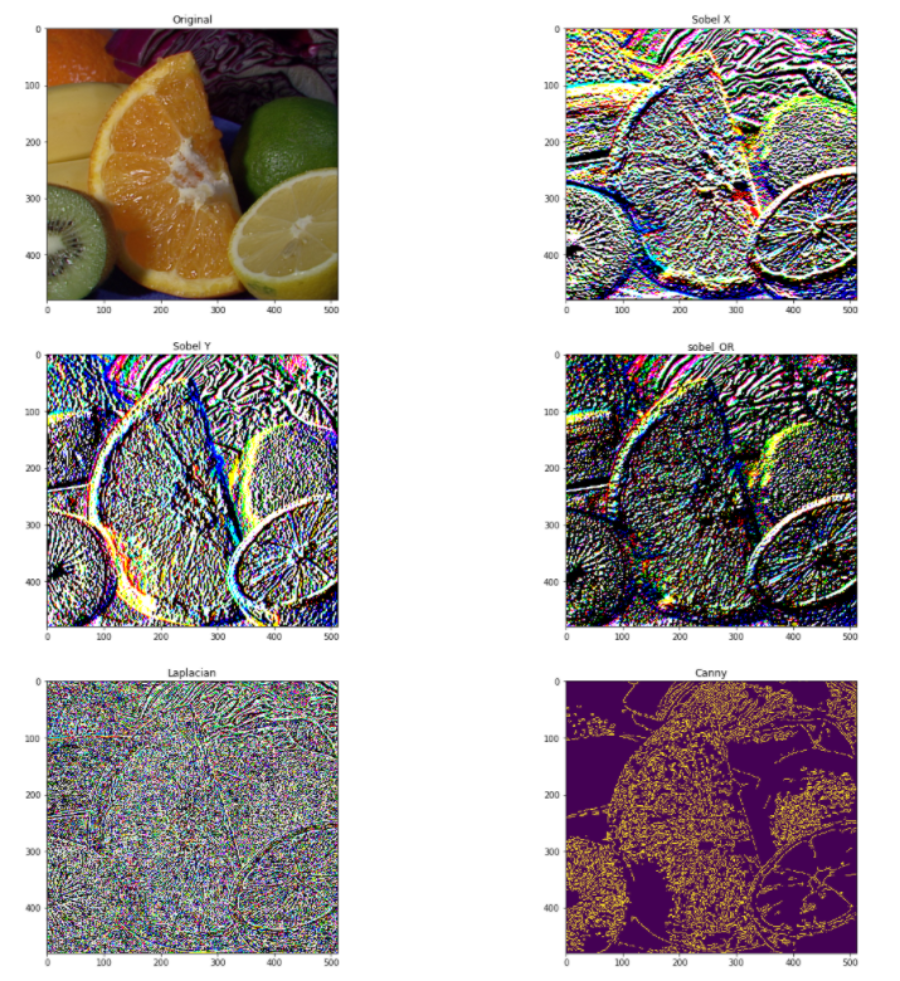
边缘检测和图像梯度
它是图像处理中最基本和最重要的技术之一。检查以下代码以获取完整实现。
image = cv2.imread('fruit.jpg')image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)hgt, wdt,_ = image.shape# Sobel Edgesx_sobel = cv2.Sobel(image, cv2.CV_64F, 0, 1, ksize=5)y_sobel = cv2.Sobel(image, cv2.CV_64F, 1, 0, ksize=5)plt.figure(figsize=(20, 20))plt.subplot(3, 2, 1)plt.title("Original")plt.imshow(image)plt.subplot(3, 2, 2)plt.title("Sobel X")plt.imshow(x_sobel)plt.subplot(3, 2, 3)plt.title("Sobel Y")plt.imshow(y_sobel)sobel_or = cv2.bitwise_or(x_sobel, y_sobel)plt.subplot(3, 2, 4)plt.imshow(sobel_or)laplacian = cv2.Laplacian(image, cv2.CV_64F)plt.subplot(3, 2, 5)plt.title("Laplacian")plt.imshow(laplacian)## There are two values: threshold1 and threshold2.## Those gradients that are greater than threshold2 => considered as an edge## Those gradients that are below threshold1 => considered not to be an edge.## Those gradients Values that are in between threshold1 and threshold2 => either classi?ed as edges or non-edges# The first threshold gradientcanny = cv2.Canny(image, 50, 120)plt.subplot(3, 2, 6)plt.imshow(canny)
图像的膨胀、打开、关闭和腐蚀
这是基本的图像处理操作。这些用于去除噪声、查找图像中的强度洞或凹凸等等。检查以下代码以获得实际实现。image = cv2.imread('LinuxLogo.jpg')image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)plt.figure(figsize=(20, 20))plt.subplot(3, 2, 1)plt.title("Original")plt.imshow(image)kernel = np.ones((5,5), np.uint8)erosion = cv2.erode(image, kernel, iterations = 1)plt.subplot(3, 2, 2)plt.title("Erosion")plt.imshow(erosion)dilation = cv2.dilate(image, kernel, iterations = 1)plt.subplot(3, 2, 3)plt.title("Dilation")plt.imshow(dilation)opening = cv2.morphologyEx(image, cv2.MORPH_OPEN, kernel)plt.subplot(3, 2, 4)plt.title("Opening")plt.imshow(opening)closing = cv2.morphologyEx(image, cv2.MORPH_CLOSE, kernel)plt.subplot(3, 2, 5)plt.title("Closing")plt.imshow(closing)

透视变换为了获得更好的图像信息,我们可以改变视频或图像的视角。在这个转换中,我们需要通过改变视角来提供图像上我们想要获取信息的点。在 OpenCV 中,我们使用两个函数进行透视变换getPerspectiveTransform()和warpPerspective()。检查以下代码以获取完整实现。
image = cv2.imread('scan.jpg')image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)plt.figure(figsize=(20, 20))plt.subplot(1, 2, 1)plt.title("Original")plt.imshow(image)points_A = np.float32([[320,15], [700,215], [85,610], [530,780]])points_B = np.float32([[0,0], [420,0], [0,594], [420,594]])M = cv2.getPerspectiveTransform(points_A, points_B)warped = cv2.warpPerspective(image, M, (420,594))plt.subplot(1, 2, 2)plt.title("warpPerspective")plt.imshow(warped)

图像金字塔
当我们需要缩放对象检测时,这是一项非常有用的技术。OpenCV 使用两种常见的图像金字塔:高斯金字塔和拉普拉斯金字塔。使用OpenCV 中的pyrUp()和pyrDown()函数对图像进行下采样或上采样。检查以下代码以获得实际实现。
image = cv2.imread('butterfly.jpg')image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)plt.figure(figsize=(20, 20))plt.subplot(2, 2, 1)plt.title("Original")plt.imshow(image)smaller = cv2.pyrDown(image)larger = cv2.pyrUp(smaller)plt.subplot(2, 2, 2)plt.title("Smaller")plt.imshow(smaller)plt.subplot(2, 2, 3)plt.title("Larger")plt.imshow(larger)

裁剪它是图像处理中最重要和最基本的技术之一,裁剪用于获取图像的特定部分。裁剪图像。你只需要根据你感兴趣的区域从图像中获取坐标。如需完整分析,请查看 OpenCV 中的以下代码。
image = cv2.imread('messi.jpg')image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)plt.figure(Aigsize=(20, 20))plt.subplot(2, 2, 1)plt.title("Original")plt.imshow(image)hgt, wdt = image.shape[:2]start_row, start_col = int(hgt * .25), int(wdt * .25)end_row, end_col = int(height * .75), int(width * .75)cropped = image[start_row:end_row , start_col:end_col]plt.subplot(2, 2, 2)plt.imshow(cropped)

缩放、插值和重新调整大小
调整大小是 OpenCV 中最简单的任务之一。它提供了一个resize()函数,它接受图像、输出大小图像、插值、x 比例和 y 比例等参数。检查以下代码以获取完整实现。image = cv2.imread('/kaggle/input/opencv-samples-images/data/fruits.jpg')image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)plt.figure(figsize=(20, 20))plt.subplot(2, 2, 1)plt.title("Original")plt.imshow(image)image_scaled = cv2.resize(image, None, fx=0.75, fy=0.75)plt.subplot(2, 2, 2)plt.title("Scaling - Linear Interpolation")plt.imshow(image_scaled)img_scaled = cv2.resize(image, None, fx=2, fy=2, interpolation = cv2.INTER_CUBIC)plt.subplot(2, 2, 3)plt.title("Scaling - Cubic Interpolation")plt.imshow(img_scaled)img_scaled = cv2.resize(image, (900, 400), interpolation = cv2.INTER_AREA)plt.subplot(2, 2, 4)plt.title("Scaling - Skewed Size")plt.imshow(img_scaled)

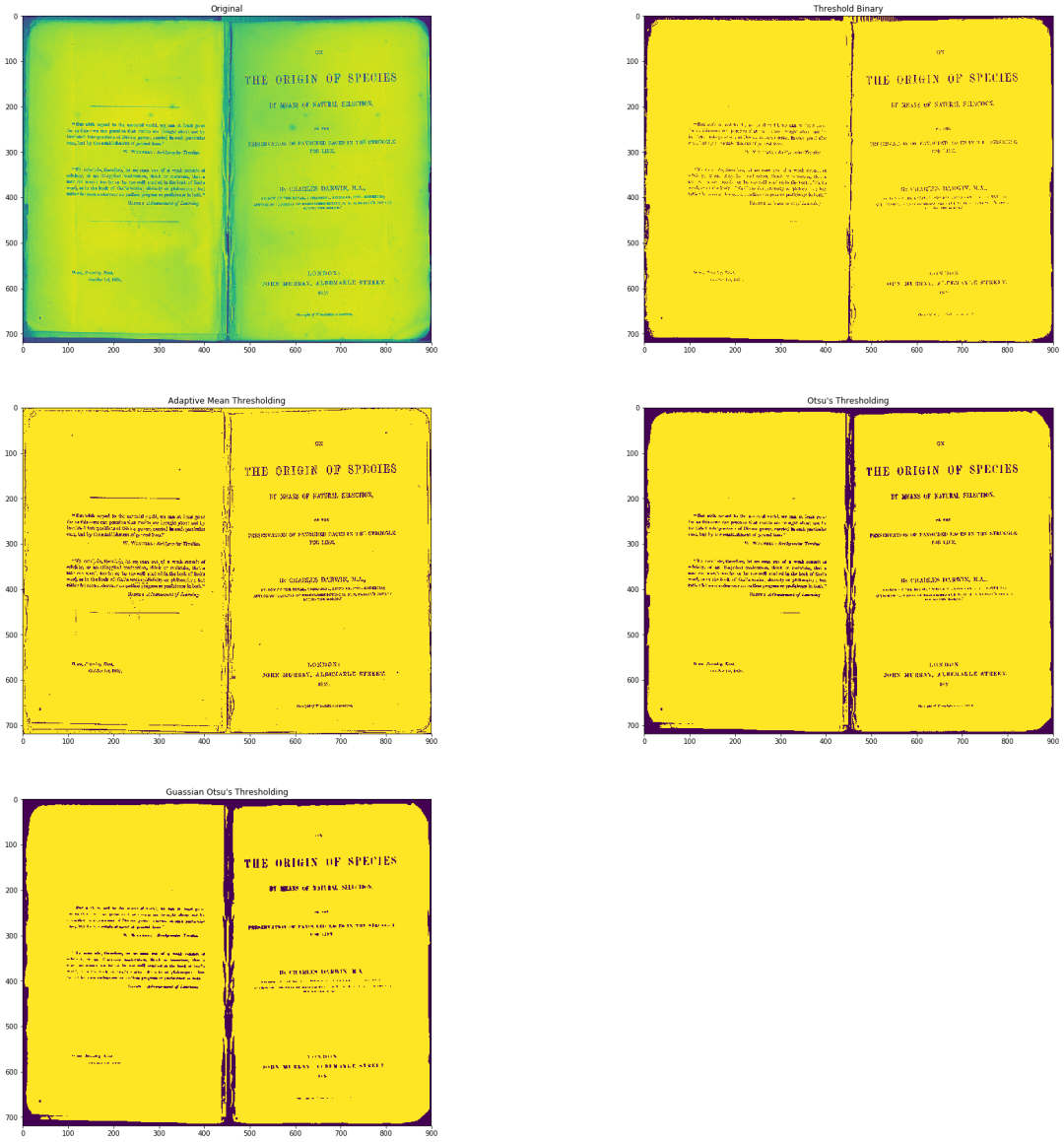
阈值、自适应阈值和二值化检查以下代码以获取完整实现。
# Load our new imageimage = cv2.imread('Origin_of_Species.jpg', 0)plt.figure(figsize=(30, 30))plt.subplot(3, 2, 1)plt.title("Original")plt.imshow(image)ret,thresh1 = cv2.threshold(image, 127, 255, cv2.THRESH_BINARY)plt.subplot(3, 2, 2)plt.title("Threshold Binary")plt.imshow(thresh1)image = cv2.GaussianBlur(image, (3, 3), 0)thresh = cv2.adaptiveThreshold(image, 255, cv2.ADAPTIVE_THRESH_MEAN_C, cv2.THRESH_BINARY, 3, 5) plt.subplot(3, 2, 3)plt.title("Adaptive Mean Thresholding")plt.imshow(thresh)_, th2 = cv2.threshold(image, 0, 255, cv2.THRESH_BINARY + cv2.THRESH_OTSU)plt.subplot(3, 2, 4)plt.title("Otsu's Thresholding")plt.imshow(th2)plt.subplot(3, 2, 5)blur = cv2.GaussianBlur(image, (5,5), 0)_, th3 = cv2.threshold(blur, 0, 255, cv2.THRESH_BINARY + cv2.THRESH_OTSU)plt.title("Guassian Otsu's Thresholding")plt.imshow(th3)plt.show()
锐化检查以下代码以使用 OpenCV 锐化图像。
image = cv2.imread('building.jpg')
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)plt.figure(figsize=(20, 20))plt.subplot(1, 2, 1)plt.title("Original")plt.imshow(image)kernel_sharpening = np.array([[-1,-1,-1], [-1,9,-1], [-1,-1,-1]])sharpened = cv2.filter2D(image, -1, kernel_sharpening)plt.subplot(1, 2, 2)plt.title("Image Sharpening")plt.imshow(sharpened)plt.show()

模糊检查以下代码以使用 OpenCV 模糊图像。
image = cv2.imread('home.jpg')
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)plt.figure(figsize=(20, 20))plt.subplot(2, 2, 1)plt.title("Original")plt.imshow(image)kernel_3x3 = np.ones((3, 3), np.float32) / 9blurred = cv2.filter2D(image, -1, kernel_3x3)plt.subplot(2, 2, 2)plt.title("3x3 Kernel Blurring")plt.imshow(blurred)kernel_7x7 = np.ones((7, 7), np.float32) / 49blurred2 = cv2.filter2D(image, -1, kernel_7x7)plt.subplot(2, 2, 3)plt.title("7x7 Kernel Blurring")plt.imshow(blurred2)

轮廓图像轮廓——这是一种识别图像中对象结构轮廓的方法。有助于识别物体的形状。OpenCV 提供了一个findContours函数,你需要在其中传递 canny 边缘作为参数。检查以下代码以获取完整实现。
# Load the dataimage = cv2.imread('pic.png')image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)plt.figure(figsize=(20, 20))plt.subplot(2, 2, 1)plt.title("Original")plt.imshow(image)# Grayscalegray = cv2.cvtColor(image,cv2.COLOR_BGR2GRAY)# Canny edgesedged = cv2.Canny(gray, 30, 200)plt.subplot(2, 2, 2)plt.title("Canny Edges")plt.imshow(edged)# Finding Contourscontour, hier = cv2.findContours(edged, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)plt.subplot(2, 2, 3)plt.imshow(edged)print("Count of Contours = " + str(len(contour)))# All contourscv2.drawContours(image, contours, -1, (0,255,0), 3)plt.subplot(2, 2, 4)plt.title("Contours")plt.imshow(image)

使用霍夫线检测线可以使用霍夫线检测图像中的线条。OpenCV 提供了一个HouhLines 函数,你必须在其中传递阈值。阈值是将其视为一条线的最低投票数。有关详细概述,请查看以下代码中,利用OpenCV中的HoughLines() 实现直线检测。
# Load the imageimage = cv2.imread('sudoku.png')image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)plt.figure(figsize=(20, 20))# Grayscale gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)# Canny Edgesedges = cv2.Canny(gray, 100, 170, apertureSize = 3)plt.subplot(2, 2, 1)plt.title("edges")plt.imshow(edges)# Run HoughLines Fucntion lines = cv2.HoughLines(edges, 1, np.pi/180, 200)# Run for loop through each linefor line in lines: rho, theta = line[0] a = np.cos(theta) b = np.sin(theta) x0 = a * rho y0 = b * rho x_1 = int(x0 + 1000 * (-b)) y_1 = int(y0 + 1000 * (a)) x_2 = int(x0 - 1000 * (-b)) y_2 = int(y0 - 1000 * (a)) cv2.line(image, (x_1, y_1), (x_2, y_2), (255, 0, 0), 2)# Show Final outputplt.subplot(2, 2, 2)plt.imshow(image)

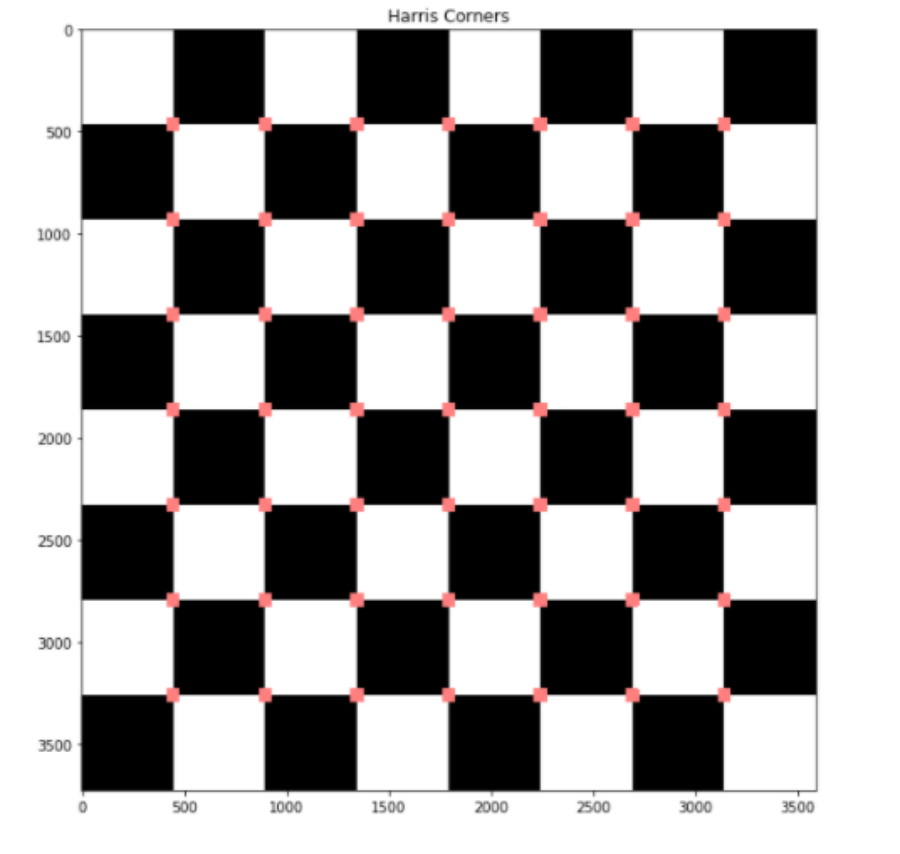
寻找角落要找到图像的角点,请使用OpenCV 中的cornerHarris 函数。有关详细概述,请查看以下代码,获取使用 OpenCV 查找角点的完整实现。
# Load image image = cv2.imread('chessboard.png')# Grayscalingimage = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)plt.figure(figsize=(10, 10))gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)# CornerHarris function want input to be floatgray = np.float32(gray)h_corners = cv2.cornerHarris(gray, 3, 3, 0.05)kernel = np.ones((7,7),np.uint8)h_corners = cv2.dilate(harris_corners, kernel, iterations = 10)image[h_corners > 0.024 * h_corners.max() ] = [256, 128, 128]plt.subplot(1, 1, 1)# Final Outputplt.imshow(image)
计算圆和椭圆要计算 图像中的圆和椭圆,请使用OpenCV 中的SimpleBlobDetector 函数。有关详细概述,请查看以下代码,以获取 使用 OpenCV 计算图像中的圆和椭圆的完整实现。
# Load imageimage = cv2.imread('blobs.jpg')image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)plt.figure(figsize=(20, 20))detector = cv2.SimpleBlobDetector_create()# Detect blobspoints = detector.detect(image)blank = np.zeros((1,1)) blobs = cv2.drawKeypoints(image, points, blank, (0,0,255), cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)number_of_blobs = len(keypoints)text = "Total Blobs: " + str(len(keypoints))cv2.putText(blobs, text, (20, 550), cv2.FONT_HERSHEY_SIMPLEX, 1, (100, 0, 255), 2)plt.subplot(2, 2, 1)plt.imshow(blobs)# Filtering parameters# Initialize parameter settiing using cv2.SimpleBlobDetectorparams = cv2.SimpleBlobDetector_Params()# Area filtering parametersparams.filterByArea = Trueparams.minArea = 100# Circularity filtering parametersparams.filterByCircularity = True params.minCircularity = 0.9# Convexity filtering parametersparams.filterByConvexity = Falseparams.minConvexity = 0.2# inertia filtering parametersparams.filterByInertia = Trueparams.minInertiaRatio = 0.01# detector with the parametersdetector = cv2.SimpleBlobDetector_create(params)# Detect blobskeypoints = detector.detect(image)# Draw blobs on our image as red circlesblank = np.zeros((1,1)) blobs = cv2.drawKeypoints(image, keypoints, blank, (0,255,0), cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)number_of_blobs = len(keypoints)text = "No. Circular Blobs: " + str(len(keypoints))cv2.putText(blobs, text, (20, 550), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 100, 255), 2)# Show blobsplt.subplot(2, 2, 2)plt.title("Filtering Circular Blobs Only")plt.imshow(blobs)

尾注
因此,在本文中,我们详细讨论了使用 OpenCV进行图像处理。希望你能从这个博客中学到一些东西,它会在未来对你有所帮助。感谢你的耐心阅读。祝你好运!
郑重声明:文章仅代表原作者观点,不代表本站立场;如有侵权、违规,可直接反馈本站,我们将会作修改或删除处理。
相关阅读





猜你喜欢
-
一文了解Siamese network
2021-06-29 -
一文了解计算机视觉中的特征金字塔技术总结
2021-06-29 -
一文读懂新iPhone的亮点,是不是真香?
2021-06-29 -
一文了解文字识别OCR开源框架的对比
2021-06-28 -
一文了解DDR3系列之时钟信号的差分电容
2021-06-25 -
一文教你如何利用鸿蒙OS实现智慧家居·LOT上云项目
2021-06-24 -
走近EasyDL:一文教你制作自己的AI应用
2021-06-23 -
一文了解计算机视觉未来的走向
2021-06-23 -
一文详解HiveSQL执行计划
2021-06-23 -
一文读懂物联网系统中的开发工作
2021-06-23 -
一文详解损失函数技术
2021-06-21 -
一文看懂锐科激光的焊接战略:上半年增长150% 推动激光走向高端制造
2021-06-18 -
一文了解什么是深度学习
2021-06-17 -
如何使用Python OpenCV混合图像?
2021-06-15 -
Python中最有用的图像处理库研究
2021-06-15











