《福建省海漂垃圾综合治理奖补资金管理办法》发布
工业机器人按操作机坐标形式分以下几类:
1)直角坐标型工业机器人
其运动部分由三个相互垂直的直线移动(即PPP)组成,其工作空间图形为长方形。它在各个轴向的移动距离,可在各个坐标轴上直接读出,直观性强,易于位置和姿态的编程计算,定位精度高,控制无耦合,结构简单,但机体所占空间体积大,动作范围小,灵活性差,难与其他工业机器人协调工作。
2)圆柱坐标型工业机器人
其运动形式是通过一个转动和两个移动组成的运动系统来实现的,其工作空间图形为圆柱,与直角坐标型工业机器人相比,在相同的工作空间条件下,机体所占体积小,而运动范围大,其位置精度仅次于直角坐标型机器人,难与其他工业机器人协调工作。
3)球坐标型工业机器人
球坐标型工业机器人又称极坐标型工业机器人,其手臂的运动由两个转动和一个直线移动(即RRP,一个回转,一个俯仰和一个伸缩运动)所组成,其工作空间为一球体,它可以作上下俯仰动作并能抓取地面上或教低位置的协调工件,其位置精度高,位置误差与臂长成正比。
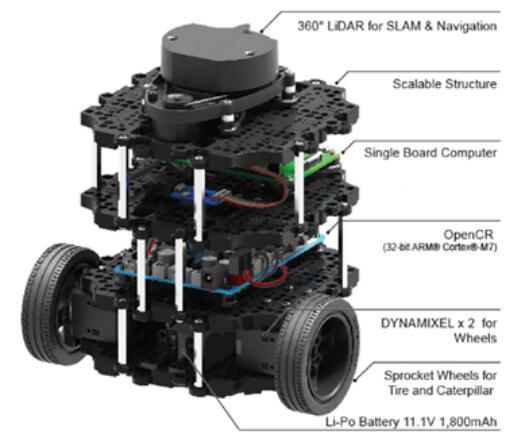
4)多关节型工业机器人
又称回转坐标型工业机器人,这种工业机器人的手臂与人一体上肢类似,其前三个关节是回转副(即RRR),该工业机器人一般由立柱和大小臂组成,立柱与大臂见形成肩关节,大臂和小臂间形成肘关节,可使大臂做回转运动和俯仰摆动,小臂做仰俯摆动。其结构最紧凑,灵活性大,占地面积最小,能与其他工业机器人协调工作,但位置精度教低,有平衡问题,控制耦合,这种工业机器人应用越来越广泛。
5)平面关节型工业机器人
它采用一个移动关节和两个回转关节(即PRR),移动关节实现上下运动,而两个回转关节则控制前后、左右运动。这种形式的工业机器人又称(SCARA(Seletive Compliance Assembly Robot Arm)装配机器人。在水平方向则具有柔顺性,而在垂直方向则有教大的刚性。它结构简单,动作灵活,多用于装配作业中,特别适合小规格零件的插接装配,如在电子工业的插接、装配中应用广泛。
郑重声明:文章仅代表原作者观点,不代表本站立场;如有侵权、违规,可直接反馈本站,我们将会作修改或删除处理。
相关阅读



猜你喜欢
-
机器人运动自由度与运动精度
2021-05-24 -
哈工智能押注工业机器人能否扭转业绩颓势
2021-05-24 -
机器人如何进行运动规划
2021-05-20 -
机器人感知系统是如何工作的?
2021-05-19 -
简析水下机器人的应用场景
2021-05-18